Carsten Groen's (OZ9AAR) personal place
Interests and experiences
Electronics for RC models
Due to my interst in embedded electronics and sofftware, combined with a passion for RC modelling, I have developed a number of electronic gadgets for RC models. The devices are in use in both my own and some of my friends model planes. They can all send telemetry data to either Futaba transmitters using SBUS2, Jeti transmitters using EX Bus (both 125 KBaud and 250 KBaud, autodetect) or the brand new PowerBox CORE transmitter. Optionally, using the CAN-Radio module to an advanced Android application based groundstation.
Most of the modules can communicate with each other using a highspeed CAN bus.
The CAN Bus is also used when the system sends seperate telemetry data to the ground (optional)
Most of the devices works together with Futaba SBUS(2) systems (transmitter 18MZ, 18SZ, 14SG, FX32 etc)
CRU
The "CRU - Central Retract Unit" is an advanced retract controller for electrical retracts and brakes. It controls 3 electric retract mechanisms and 3 electrical brakes. It has a builtin Gyro (for "ABS" brakes and nosewheel compensation), it monitors the current seperately thru each retract and thru each brake! It can control up to 4 geardoor servos using its built-in sequencer, the current thru these 4 door servos are also monitored (as a combined current, this enables detection of "stuck geardoors"). All data is sent back to the RC transmitter, currently Jeti, PowerBox Core and Futaba are supported. The CRU also have a seperate input for an small external switch, this allows you to cycle the gear without turning the transmitter on.









SB-IAS
Measures true airspeed. Exists in two versions, one up to 480 Km/H and one for 1030 Km/H. Can deliver the result as "True Airspeed" (for 18MZ and 14SG) or as "GPS speed" in Km/H for 18SZ, FX32 etc. Supports also PowerBox Core and Jeti EX Bus systems (configurable for metric (Km/H) or imperial (MPH) units). On Jeti EX Bus you can have up to 10 of these devices!
Manual: SB-IAS
Jeti: Configuration
CTU
The CTU (Central Telemetric Unit) can talk with virtually all RC turbines on the market and sends data for the engine to the transmitter on the ground. Primarily it supports PowerBox Core and Jeti (configured via Jeti Device Explorer or Core menu system). The CTU also measures G forces (3 dimension), it has a builtin altimeter that measures the height etc. It also gives you two EX Bus ports to connect other sensors to. A CAN bus connector allows connection to future highspeed devices. Creates datalog on SD card



ASSI-J2
A special version of the ASSI and ASSI-2 board. The ASSI-J2 supports Jeti radios, has a Airspeed sensor, 3D G sensor, IMU sensor (Roll/Pitch) and a high resolution airflow sensor (AoA, sideslip etc). It also has 8 PWM servo outputs that can be tailored for specific use. Interfaces with all turbine types on the market and delivers realtime telemetry data for the engine (also allows for hot-refuel reset of fuel consumption etc). Creates datalog on SD card
ASSI system
The ASSI device is a complex unit with a number of subsystems. It will return up to 12 telemetry
values to your transmitter, measure airspeed, the Angle of Attack (AoA) (optional), the G forces (in 3D) your plane is exposed to, collect valuable data from your JetCat engine(s) or Xicoy ECU(s), monitor receiver signal quality, the number of failsafe frames, control the throttle (auto throttle) of your
engine(s), maintain programmed IAS for 5 flap positions and issue warning signals using ultrabright
LEDs if the IAS is above/below the programmed speed. Using a communication bus (CAN Bus) the device will also send out data that can be shown on cockpit mounted LCD screens (optional) in the plane. The data can also be used by any slaves in a multi engine
setup. All of the parameters sampled will be logged to a SD card mounted in the device.
Manual: ASSI


Android Telemetry system
Complete Android based telemetry system. Uses the ASSI board and CAN-RF enabling a seperate telemetry downlink from the plane to the ground. All kinds of warnings/infomations can be enabled for the pilot (usually wearing a Bluetooth earpiece for the audio)

ASSI-2
Basically the next generation of ASSI device. Contains all the features of the original ASSI device, and on top of that:
direct support for 2 engines
IMU
Radiolink for telemetry downlink (same as the CAN-RF module), 4 PWM inputs, 8 PWM outputs, much more processing power, USB interface (update etc).
Also supports Jeti EX Bus.

FLEX-LCD
Battery driven terminal with 433 MHz radio link to the Telemetry system (CAN-RF, ASSI etc). Acts as a gateway also and sends data from the airborne unit out on Bluetooth (the Android app can connect to the airborne unit via the Bluetooth connection instead of using a USB connected radio module).
SB-PSENSE
Measures air pressure from retract system and sends it as telemetry to your transmitter. Transmitter can then make an alarm should the airpressure get below a certain level. Measures pressure up to 10 bar (145 PSI) with 0.1 bar resolution. Value is sent as a temperature to the transmitter as there is no "pressure sensor" type of sensor in Futaba transmitters. Also full support for Jeti EX Bus! On Jeti EX Bus you can have up to 10 of these devices!
Manual: SB-PSENSE
Jeti: Configuration

CAN-Radio
Telemetry downlink transmitter. Sends telemetry to a Android base groundstation using 433 or 915 MHz (see "Android Telemetry System on this page)


SB-EXT24
24 channel expander for SBUS2 systems. Up to 18 outputs mapped to the transmitters 18 channels and 6 outputs from the builtin gear sequencer. Has support for dual (redundancy) receivers with seperate short circuit protected powersupply, 2 battery inputs (with seperate voltage, current and consumption telemetry). Connects via CAN bus to other modules (f.ex pressure sensor for gear failsafe etc). Graphical setup of gear sequencer.









SB-EXT4/SB-EXP2+2
4 channel expander for SBUS(2) systems. 4 servo outputs from SBUS(2). The 4 outputs can be assigned from channel 1..4, 5..8, 9..12 or 13..16. On Jeti EX Bus you can have up to 10 of these devices! The SB-EXT2+2 is supported thru the Jeti Device Explorer system!
Jeti: Configuration
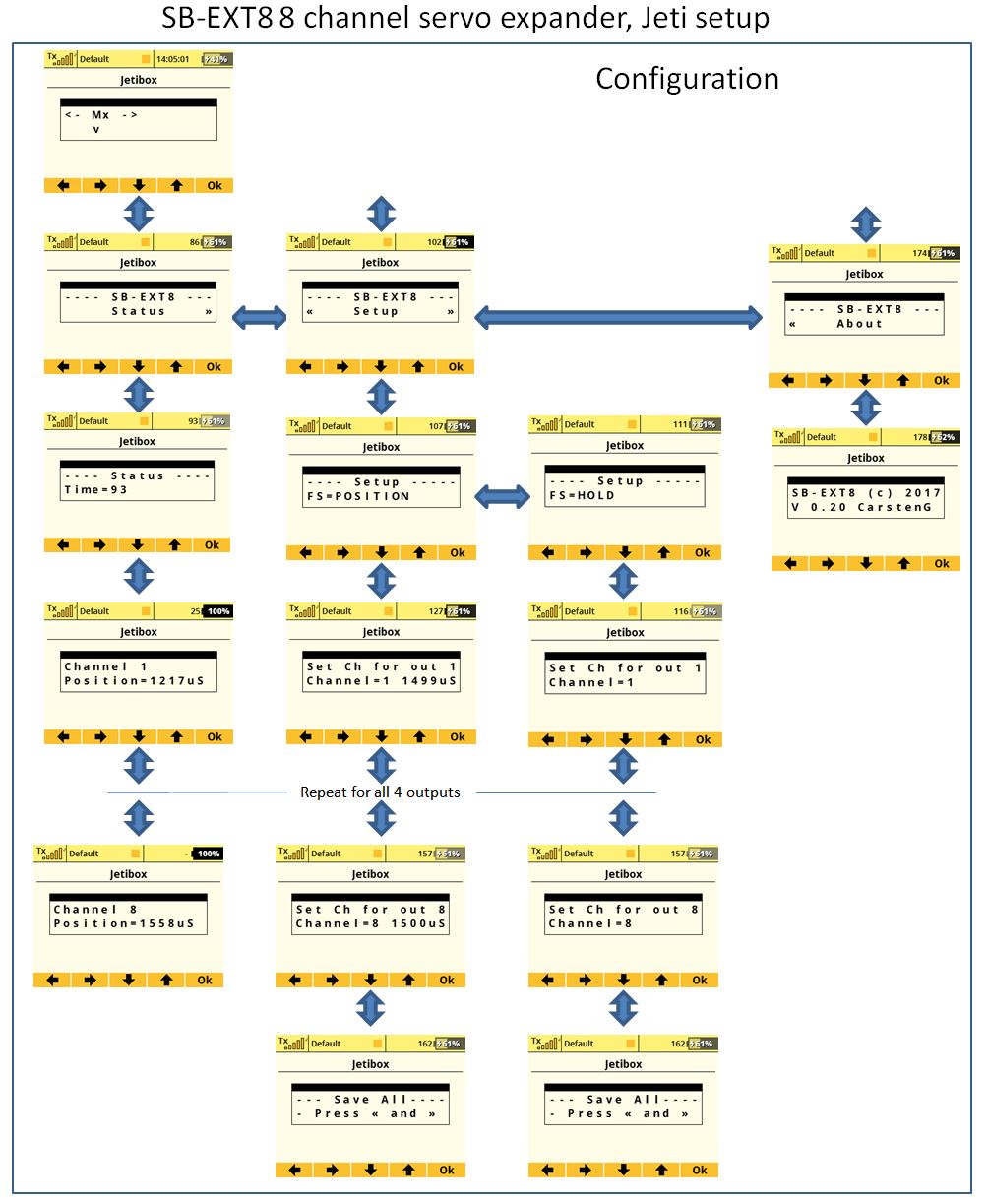
SB-EXT8
8 channel expander for SBUS(2) and Jeti EX Bus systems. 8 servo outputs. The 8 outputs can be assigned from channel 1..8 or 9..16 on Futaba systems.
On Jeti EX Bus all 8 outputs can be assigned to a channel (from 1 to 24). Individual failsafe positions (or "Hold" for all 8) outputs. On Jeti EX Bus you can have up to 10 of these devices!
Jeti: Configuration

CAN-LIDAR
LiDAR unit that measures height up to 40 meters using laser. Device compensates for roll/pitch using a onboard 3D IMU. Module sends Quaternions, pitch/roll/yaw info out on CAN bus



CAN-GPS
GPS receiver and Altimeter unit. GPS positions and altimeter info are sent out on CAN bus (4 updates pr second default)


CAN-TEMP
Measures temperature on up to 8 sensors (k Type etc) up to 1000+ degreesC. Delivers data to CAN bus (and Futaba/Jeti EX Bus) for other units to use/log the data etc.
Support for both Futaba and Jeti EX Bus. On Jeti EX Bus you can have up to 4 of these devices!
Jeti: Configuration

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
JETI-EXT2+2
Combo module that gives you 2 servo outputs from a Jeti EX Bus port. The 2 outputs can assigned to any of the 24 possible channels. Failsafe condition (Hold/Position) can be set for each output.
Also has two EX Bus (125 KBaud) channels for sensors etc. Will pass "JetiBox emulation" and handles the Jeti Device Explorer fully on both expander ports! You can cascade up to 2 of these giving you 4 EX Bus sensor inputs for 1 EX Bus connector on the receiver.

